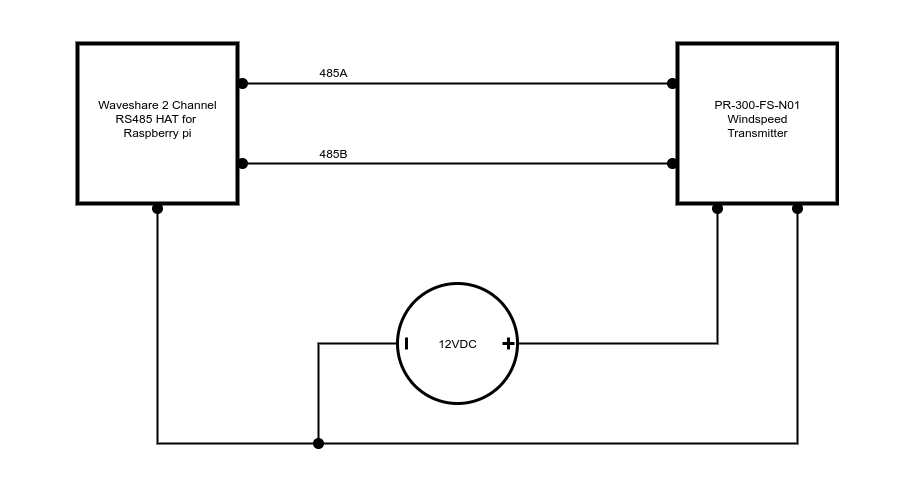
PR-3000-FS-N01 Wind speed transmitter
Posted on: November 8, 2021, in All, Python, Raspberry Pi

 This site is the personal blog and project repository of George Farris.
This site is the personal blog and project repository of George Farris.
If you are looking for the old Cowichan Valley Linux Users Group, check the side navigation. This site contains links to various projects that I either created or contribute to.
You will also find my Github page and Youtube channel here. Contact: cwg@cowlug.org
 |
 |
 |
pip3 install pyW800rf32