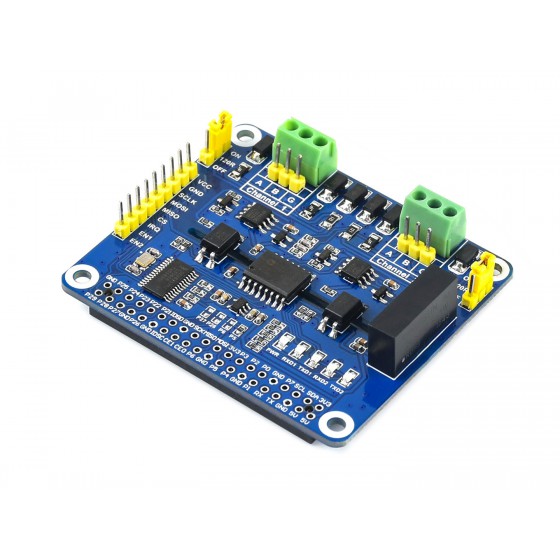
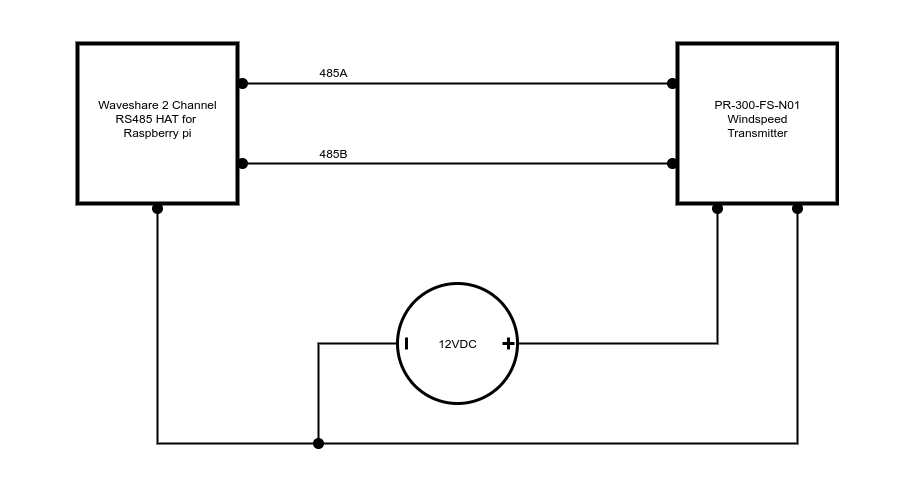
PR-3000-FS-N01 Wind speed transmitter
Posted on: November 8, 2021, in All, Python, Raspberry Pi

 This site is the personal blog and project repository of George Farris.
This site is the personal blog and project repository of George Farris.
If you are looking for the old Cowichan Valley Linux Users Group, check the side navigation. This site contains links to various projects that I either created or contribute to.
You will also find my Github page and Youtube channel here. Contact: cwg@cowlug.org
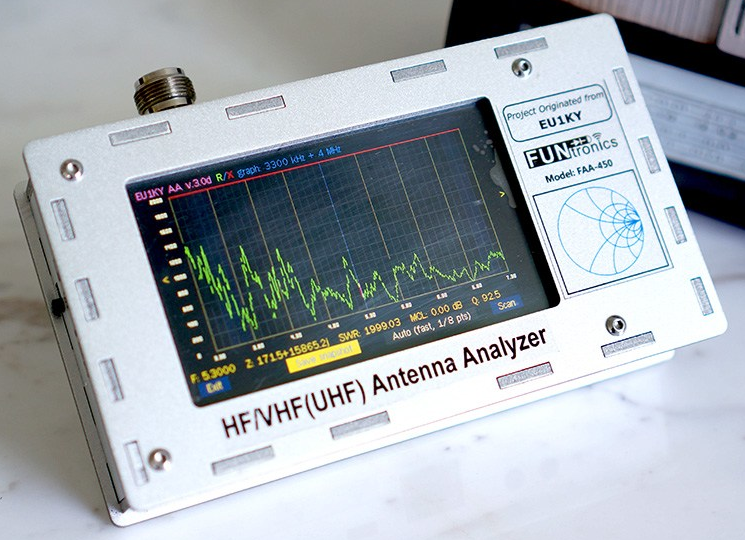 This page is a description of the modifications made to the EU1KY antenna analyzer project.
This page is a description of the modifications made to the EU1KY antenna analyzer project.
Full open source software is available at
bitbucket.org/kuchura/eu1ky_aa_v3.
Development is done by cross compiling for the STM32F746 board on windows (Embitz IDE) or
linux (makefile with arm-none-eabi-gcc). The generated F7Discovery.hex file found in the bin/Release folder is uploaded to the
device using ST-Link loader.
Programming with Windows
ST-Link loader is available from STMicroelectronics.
You will need to get the STSW-LINK004 utility and STSW-LINK007 packages.
Programming with Linux
Install stlink with your package manager.
Connect a mini usb cable to the left most (ST-LINK) port, this port is also used for charging and serial port remote control.
Goto the bin/Release folder and issue this command:
"st-flash --format ihex write F7Discovery.hex"or
"st-flash write F7Discovery.bin 0x8000000"
Modify splash screen to display QSL card.
![]()
Splash screen
Modify the signal generator screen.
The analyzer can function as a continuous wave signal generator over a frequency range
of 500kHz to 599MHz. Signals above 200MHz are actually using the 3rd harmonic of the internal source.
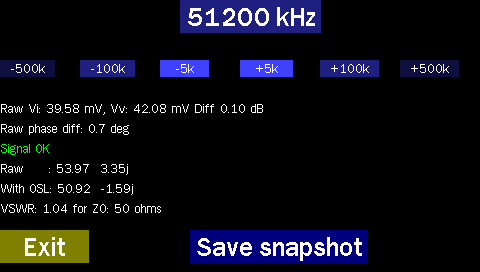
Reformated Signal Generator screen
Modify the TDR screen to display coax length in metric and imperial units.
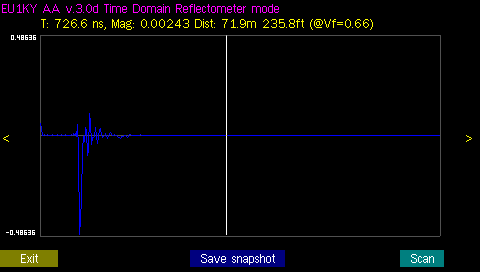
TDR scan showing both metric and imperial lengths
Modify the highlighted ham bands to represent the North American frequency ranges available.
See panvswr2.c for reference.
On the CONFIGURATION screen of your analyzer, hit Next_param until you see SHOW_HIDDEN, set it to YES. Now find the parameter labeled IARU Region and set appropriately. In North America we are Region 2.
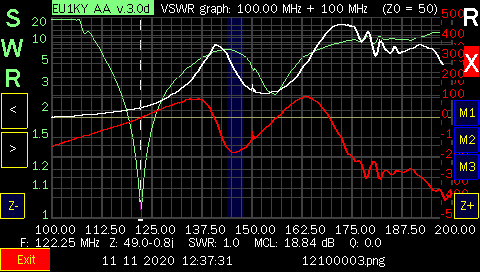
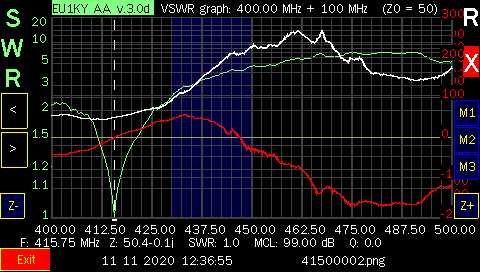
Also, you can modify the SWR panoramic display to position the cursor bar on the point of lowest SWR on the displayed graph, if you like.
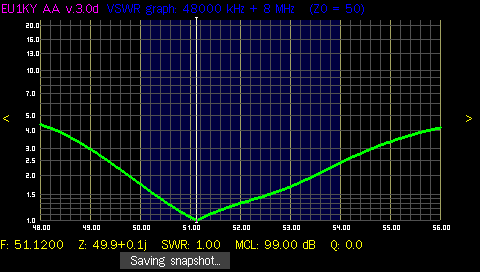
SWR scan of 6M vertical
#ifndef _DEBUG_UART
if (ShowLogo()==-1)// no logo.bmp or logo.png file found:
LCD_DrawBitmap(LCD_MakePoint(90, 24), logo_bmp, logo_bmp_size);// show original logo
while(!TOUCH_IsPressed()); // lpg hang until screen tapped
#endif
on approximately line 138 of Src/main.c change
Sleep(1000);to
Sleep(100);
//Initialize textbox context
TEXTBOX_InitContext(&main_ctx);
//modified by KD8CEC
#define BUILD_TIMESTAMP_US "23-Oct-2020-VE7FRG"
#define BUILD_TIMESTAMP_D "2020-10-23-VE7FRG"
if (DatumDDMMYYYY)
To display cable length in m and ft in a different screen location,
tdr.c display cable length in m and ft in a different screen location
FONT_Print(FONT_FRANBIG, TextColor, BackGrColor, 220, 200, "%.2fm %.1fft", lenm,lenm * 3.2808);
I had the unfortunate opportunity to drop my analyzer, I really don't recommend doing that. Needless to say it did not survive. The CPU board was damaged and the display no longer worked.
I ordered a new board from Mouser.
The battery charging would not work until I upgraded the firmware on the board, Use the LINK-007 package mentioned above to upgrade the firmware, it runs under both Windows and Linux.
On the stock board, you also need to change 4 jumper settings. Change the jumpers as follows: Remove the jumpers from SB3 and SB5, jumper SB1 and SB4. Check SB1 and SB4 for continuity and that SB3 and SB5 are now open circuit. These jumpers are near the SD card connector and are used to drive the Si5351 SCL/SCD on the RF board.
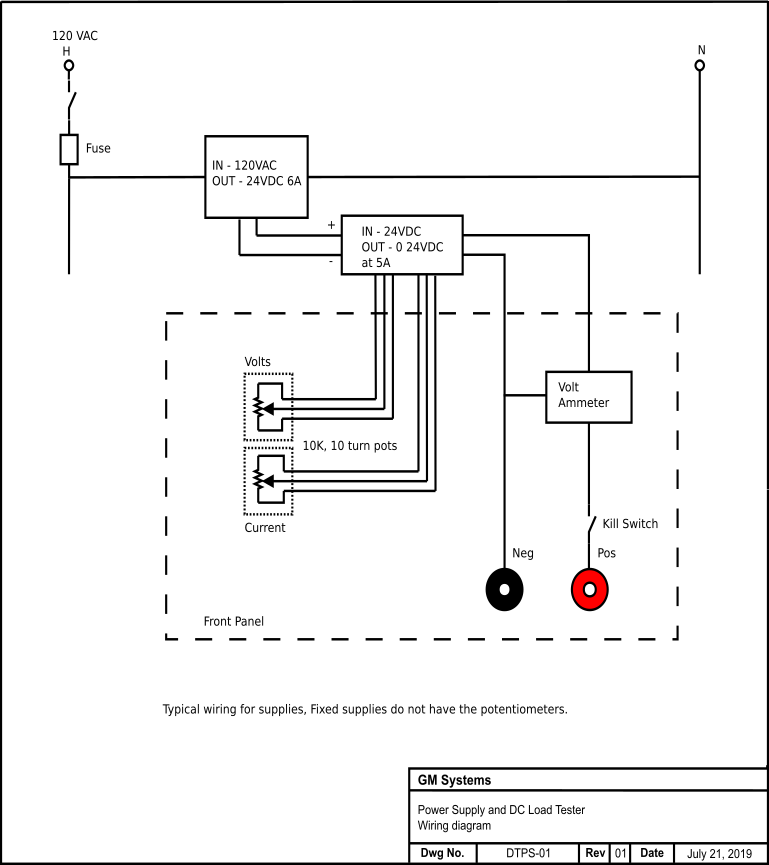
I bought all my supplies from Banggood but I'm sure they can be had from anywhere.
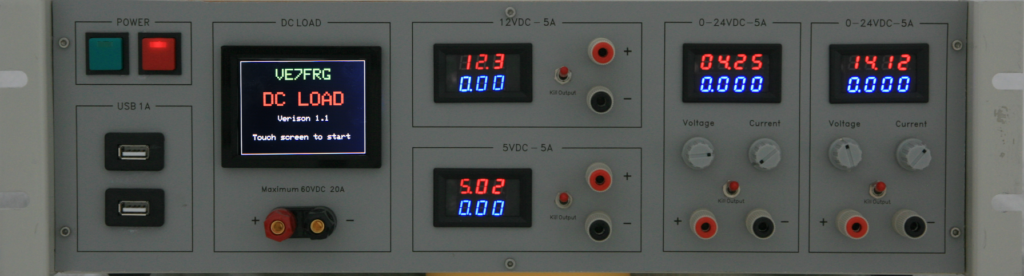
The 120VAC to 24VDC supply is a: "Geekcreit® 4A To 6A 24V Switching Power Supply Board AC-DC Power Module"
The other supplies for the variable and fixed side are constant current, constant voltage supplies, where the on board potentiometers were replaced with panel mounted potentiometers. I soldered 3 pin headers to the supplies for easy mounting and replacement.
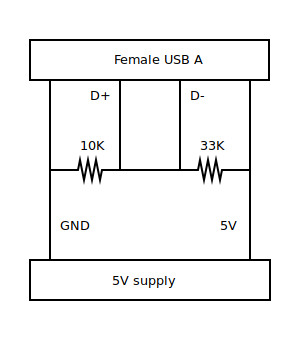
The 5VDC fixed supply is also connected to two USB A connectors on the front panel for powering and charging purposes. They run through the ammeter as well.
The wiring for the USB includes resistors that allow full current charging of supported devices.
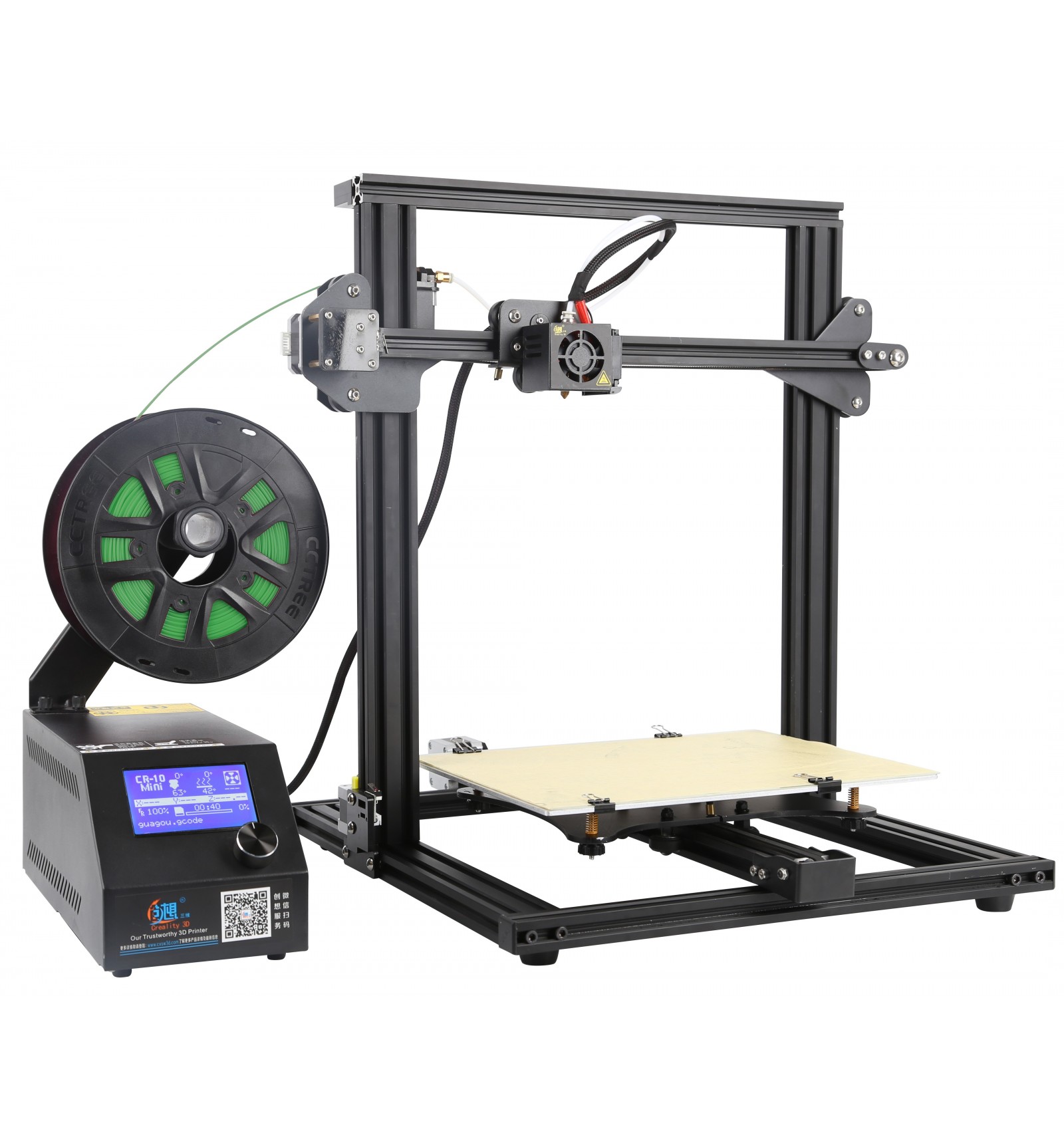
A while back I broke down and purchased a 3D printer, I chose the Creality CR-10 Mini. It's bascially the same as a regular CR-10 but not quite as tall and the bed is slightly smaller.

I also purchased a 445nm blue laser module from Banggood to engrave and cut. It is effective in cutting such things as paper, acrylic, cardboard, cloth, plastic and wood up to about 3mm. It will engrave a wide variety of material.
Please use the appropriate glasses to protect your eyes. Make sure they are rated for 445nm wavelength. This laser is seriously powerful and can blind you in an instance.

 |
 |
 |
pip3 install pyW800rf32
 .
.
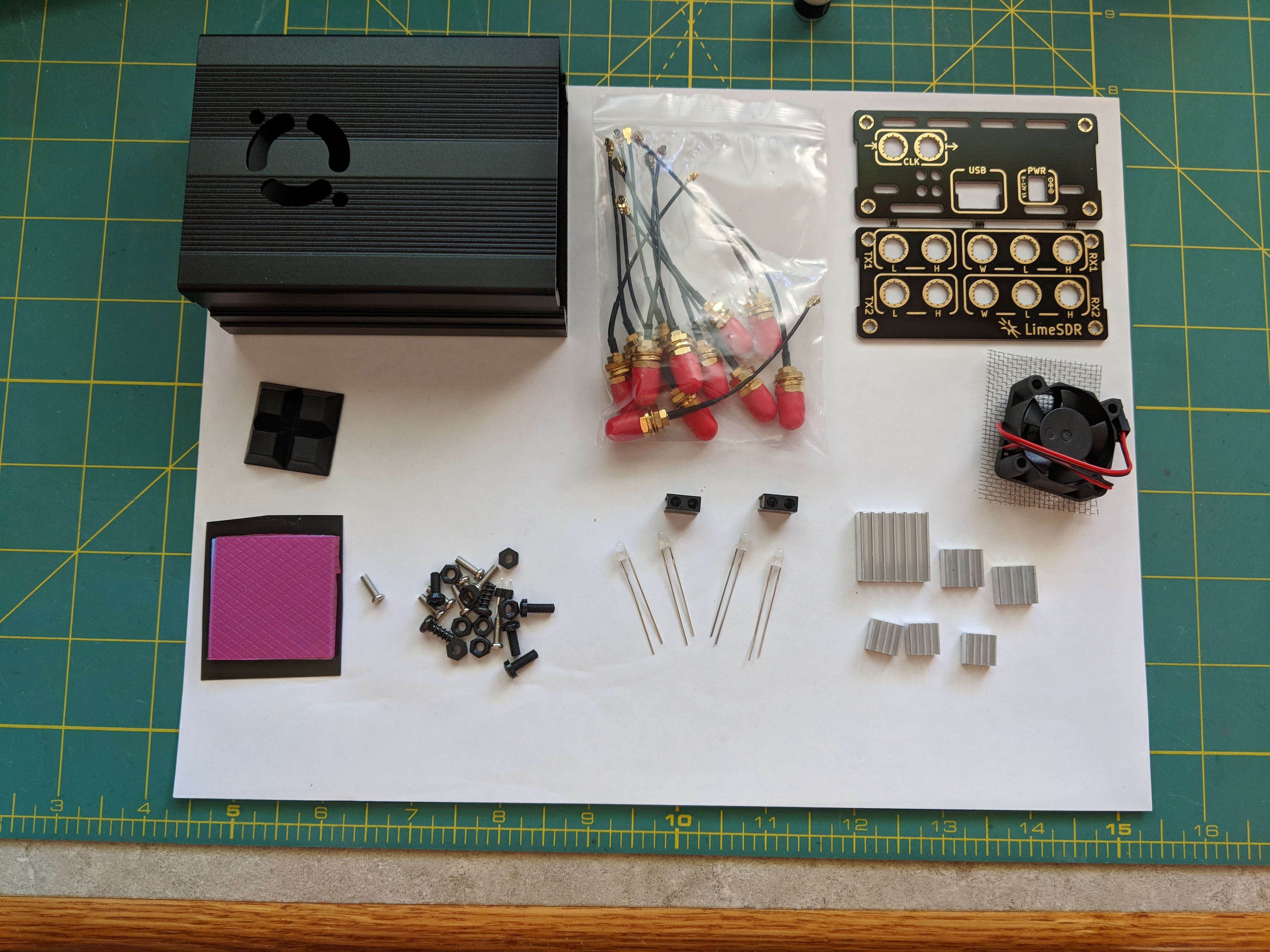
Software: There are four software packages that I use with the LimeSDR as well as the LimeSuite from Myraid RF.
Users especially Hams should consider the HF mod https://wiki.myriadrf.org/LimeSDR_HF_Performance
I recently got a TFT display and a serial port board with a small bit of breadboard space hooked up to my Raspberry Pi3, for running Pytomation.
See the side menu for more about automation with Pytomation. I wanted something I could power down, removing power from the Pi board, then start up again with the push of a button.
The entire assembly is built with the following components (see the article from January about configuring the TFT display):
 .
.
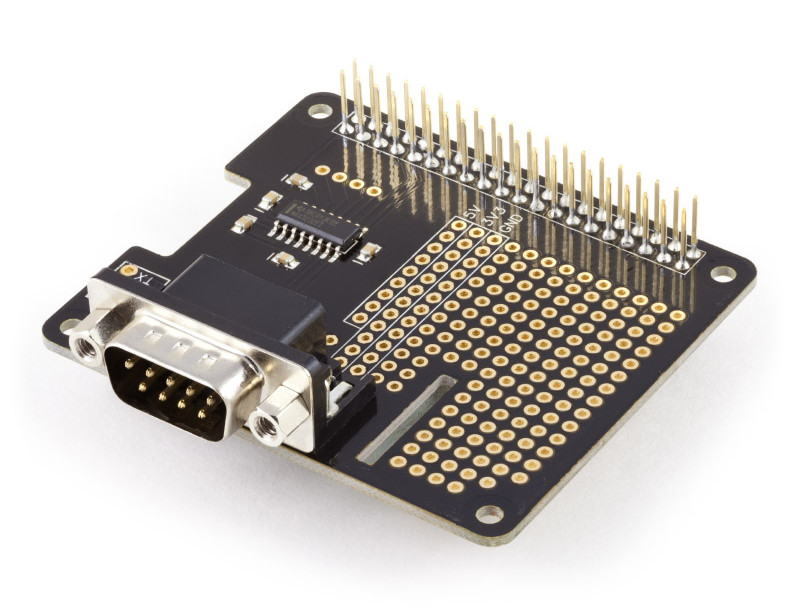
This is the Pi serial expansion board including breadboard area. It is available from https://www.abelectronics.co.uk.
 .
.
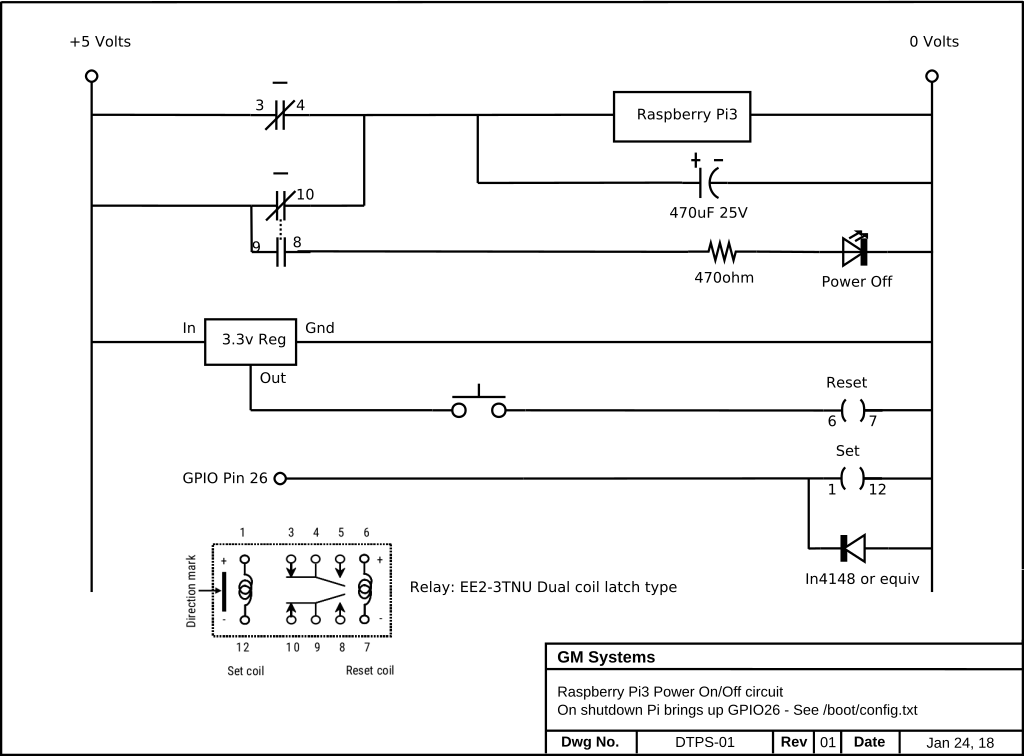
This is the schematic of the power circuit. It works as follows:
Once the Pi has booted pressing the bottom button on the TFT display, which is connected to GPIO 17, will initiate a shutdown of the operating system,
The very last action taken during the shutdown sequence is to enable (logic high, +3.3v) GPIO pin 26. GPIO 26 turns on the "set" coil of the relay which
in turn will remove power from the Pi board. The 470uF capacitor provides just enough additional power to the Pi to properly latch the relay before removing
power. Pressing the pushbutton will pulse the "reset" coil and power will be restored to the Pi, which then boots.
Here is a quick video of the board operating.
Once the board is complete with the power on/off circuit you must make some changes to your Raspbian installation.
There are two things that must be done. Add support for the power down button on the TFT display and add support for
GPIO pin 26 to change to a high state (3.3v) one it is safe to remove power from the Pi3.
To get the TFT display working see my article from January 2018,
TFT display button support:
This tells the Pi to watch GPIO pin 27 which is one of the buttons on the TFT display, when
pressed it will shutdown the Pi.
Login and edit the /boot/config.txt file to add the following at the bottom of the file.
dtoverlay=gpio-shutdown,gpio_pin=27
This is from the /boot/overlays/README file.
Name: gpio-shutdown
Info: Initiates a shutdown when GPIO pin changes. The given GPIO pin
is configured as an input key that generates KEY_POWER events.
This event is handled by systemd-logind by initiating a
shutdown. Systemd versions older than 225 need an udev rule
enable listening to the input device:
ACTION!="REMOVE", SUBSYSTEM=="input", KERNEL=="event*", \
SUBSYSTEMS=="platform", DRIVERS=="gpio-keys", \
ATTRS{keys}=="116", TAG+="power-switch"
This overlay only handles shutdown. After shutdown, the system
can be powered up again by driving GPIO3 low. The default
configuration uses GPIO3 with a pullup, so if you connect a
button between GPIO3 and GND (pin 5 and 6 on the 40-pin header),
you get a shutdown and power-up button.
Load: dtoverlay=gpio-shutdown,=
Params: gpio_pin GPIO pin to trigger on (default 3)
active_low When this is 1 (active low), a falling
edge generates a key down event and a
rising edge generates a key up event.
When this is 0 (active high), this is
reversed. The default is 1 (active low).
gpio_pull Desired pull-up/down state (off, down, up)
Default is "up".
Note that the default pin (GPIO3) has an
external pullup.
Name: gpio-poweroff
Info: Drives a GPIO high or low on poweroff (including halt). Enabling this
overlay will prevent the ability to boot by driving GPIO3 low.
Load: dtoverlay=gpio-poweroff,=
Params: gpiopin GPIO for signalling (default 26)
active_low Set if the power control device requires a
high->low transition to trigger a power-down.
Note that this will require the support of a
custom dt-blob.bin to prevent a power-down
during the boot process, and that a reboot
will also cause the pin to go low.
Now assemble all the pieces. Stack the serialpi board on the Pi first , then the TFT display hat on top of the serial board, then power on your Pi. You should be able to safely shutdown the Pi by pushing the bottom button on the TFT display. To turn the Pi back on, press the pushbutton wired into the power circuit.
Here is a picture of the completed project: .
.
This explains what I had to do to get the Adafruit 2.8″ Capacitive display working under Debian Stretch on a Raspberry Pi 3.

At this point in time, January 2018, the tutorial on the Adafruit page only deals with getting the displays working under Debian Jessie. Stretch was released on June 17th, 2017 and it’s a bit sad that Adafruit has not updated their tutorial.
Here are the steps:




{kind=link}
{kind=link}